ابزار دقیق جابجایی و سطح جابجایی
ابزار دقیق جابجایی و سطح جابجایی
نارضایتی ابزارهای سطح بهرهبرداری میکنند اصل ارشمیدس برای تشخیص سطح مایع با اندازهگیری مداوم وزن یک جسم (که ... نامیده میشود) نارضایتی) در مایع فرآیند غوطهور است. با افزایش سطح مایع، جابجاکننده نیروی شناوری بیشتری را تجربه میکند و باعث میشود که برای ابزار حسگر سبکتر به نظر برسد، که کاهش وزن را به عنوان افزایش سطح تفسیر کرده و یک سیگنال خروجی متناسب ارسال میکند.
نارضایتی ابزارهای تراز
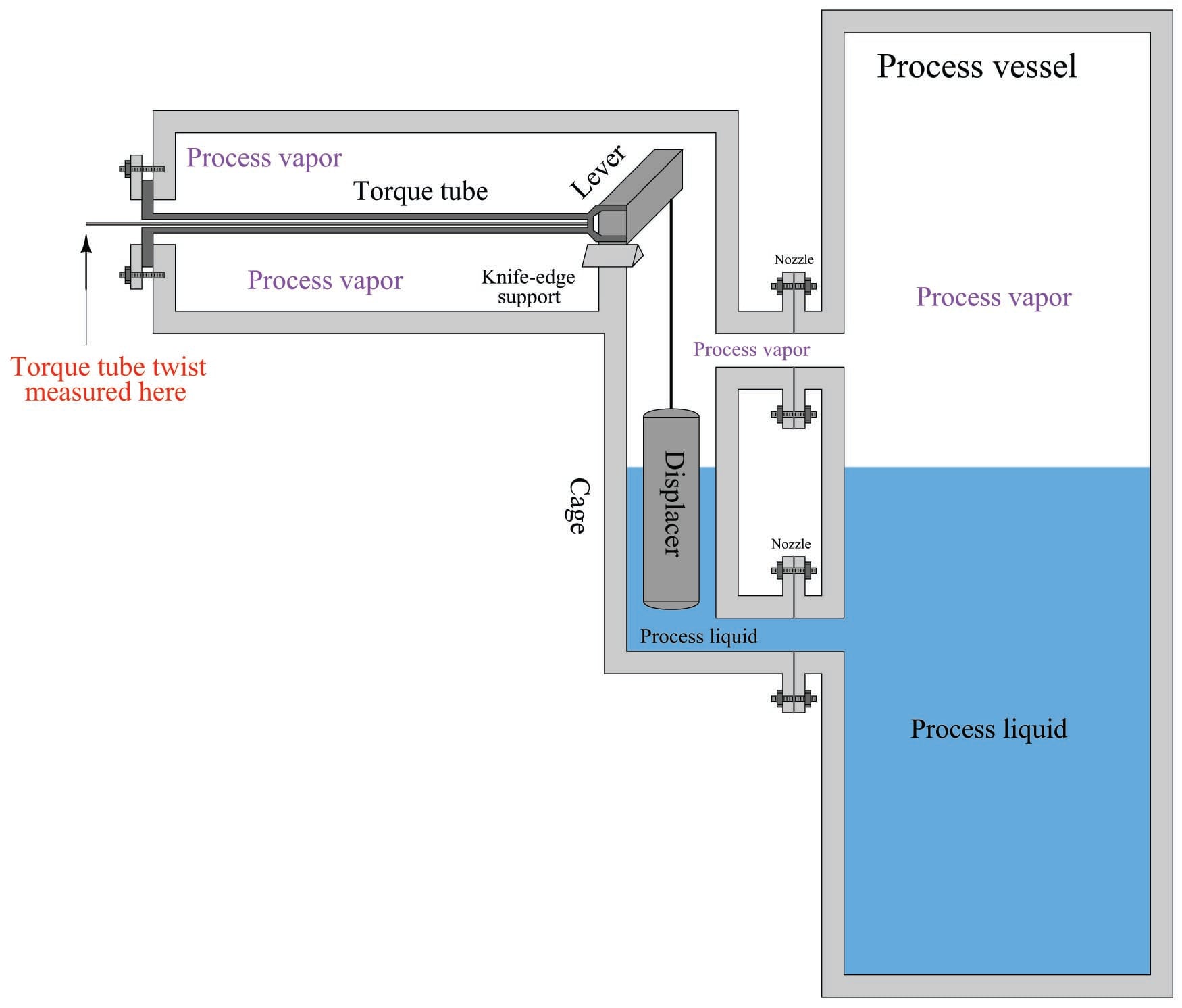
در عمل، یک ابزار اندازهگیری سطح جابهجاشونده معمولاً به شکل زیر است. برای سادگی، لولهکشی فرآیندی به داخل و خارج مخزن حذف شده است - فقط مخزن و ابزار اندازهگیری سطح جابهجاشونده آن نشان داده شده است:
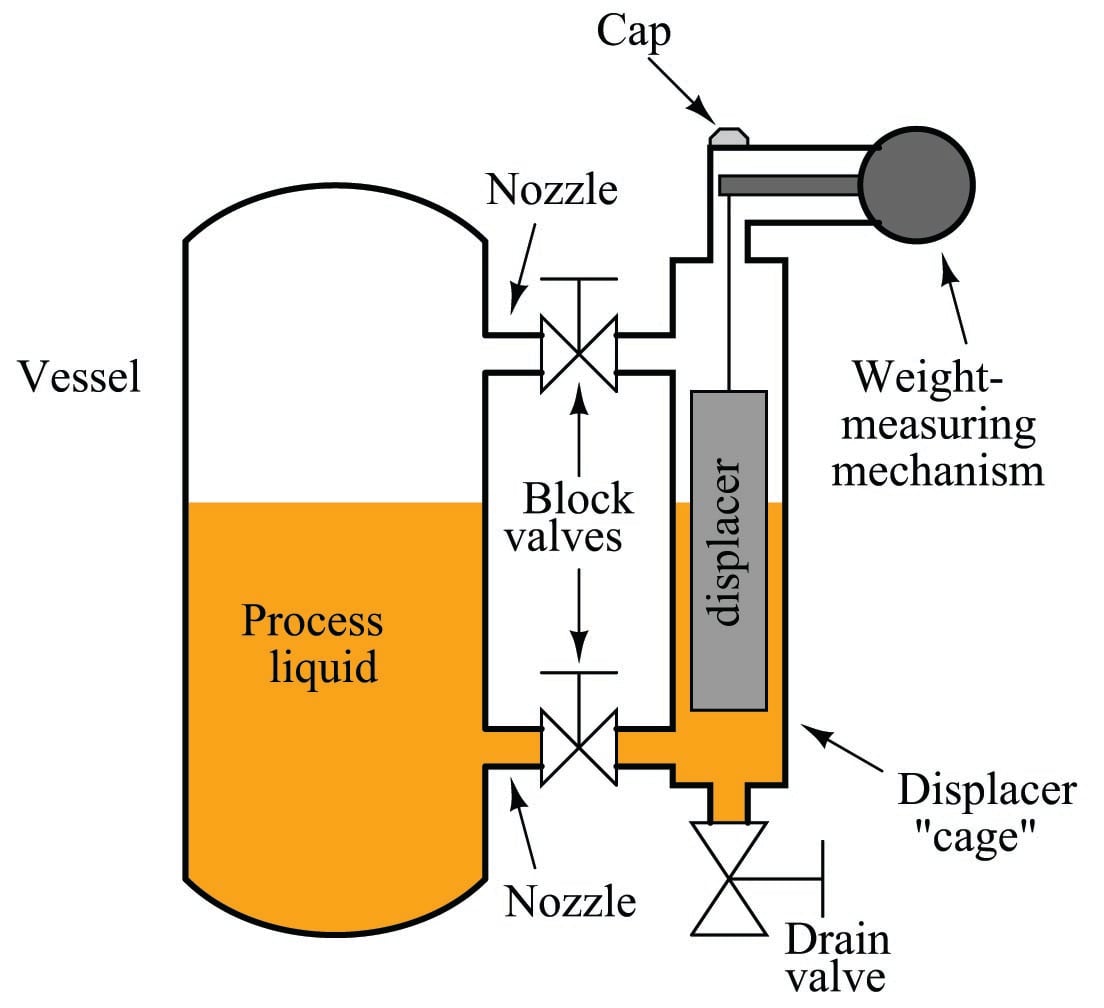
نارضایتی ابزارهای ترازخود معمولاً یک لوله فلزی آببندی شده است که به اندازه کافی وزن دارد تا نتواند در مایع فرآیند شناور شود. این لوله درون لولهای به نام «قفس» آویزان است که از طریق دو شیر مسدودکننده و نازل به مخزن فرآیند متصل است. این دو اتصال لوله تضمین میکنند که سطح مایع درون قفس با سطح مایع درون مخزن فرآیند مطابقت داشته باشد، دقیقاً مانند یک آینه دید.
اگر سطح مایع درون ظرف فرآیند بالا بیاید، سطح مایع درون قفس نیز به همان میزان بالا میرود. این امر باعث میشود حجم بیشتری از جابجاکننده در آب فرو برود و نیروی شناوری به سمت بالا بر جابجاکننده اعمال شود. به یاد داشته باشید که جابجاکننده برای شناور شدن بسیار سنگین است، بنابراین روی سطح مایع "بالا و پایین" نمیرود و به اندازه سطح مایع بالا نمیرود - بلکه در داخل قفس در جای خود آویزان میشود و با افزایش نیروی شناوری "سبکتر" میشود. مکانیسم حسگر وزن، این نیروی شناوری را هنگامی که جابجاکننده سبکتر میشود، تشخیص میدهد و کاهش وزن (ظاهری) را به عنوان افزایش سطح مایع تفسیر میکند. وزن ظاهری جابجاکننده زمانی به حداقل میرسد که کاملاً در آب فرو رفته باشد، زمانی که مایع فرآیند به نقطه ۱۰۰٪ درون قفس رسیده باشد.
لازم به ذکر است که فشار استاتیک داخل مخزن تأثیر ناچیزی بر دقت ابزار جابجایی خواهد داشت. تنها عاملی که اهمیت دارد چگالی سیال فرآیند است، زیرا نیروی شناوری مستقیماً با چگالی سیال متناسب است (
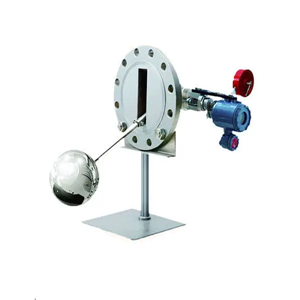
عکس زیر یک فرستنده پنوماتیک مدل فیشر “سطح-ترول” را نشان میدهد که سطح میعانات را در ... اندازهگیری میکند. طبل حذفی برای سرویس گاز طبیعی. خود دستگاه در سمت راست عکس ظاهر میشود، که در بالای آن یک "سر" خاکستری رنگ با دو فشارسنج پنوماتیکی قابل مشاهده است. "قفس" جابجاگر، لوله عمودی بلافاصله پشت و زیر واحد سر است. توجه داشته باشید که یک سطح سنج شیشهای در سمت چپ محفظه حذفی (یا بوت میعانات) برای نشان دادن بصری سطح میعانات درون مخزن فرآیند:

هدف از این دستگاه جابجایی خاص، اندازهگیری مقدار مایع میعانات جمعآوریشده در داخل «بوت» است. این مدل از فیشر سطح-ترول مجهز به یک مکانیزم کنترلکننده پنوماتیک است که سیگنال فشار هوا را به شیر تخلیه ارسال میکند تا میعانات بهطور خودکار از بوت تخلیه شوند.
دو عکس از یک دستگاه جابجایی سطح-ترول (سطح-ترول) که به صورت دمونتاژ شده در اینجا نشان داده شده است، نحوه قرارگیری جابجایی در داخل لوله قفس را نشان میدهد:


لوله قفس از طریق دو شیر مسدودکننده به مخزن فرآیند متصل شده است که امکان جداسازی از فرآیند را فراهم میکند. یک شیر تخلیه امکان تخلیه مایع فرآیند را برای سرویس ابزار دقیق و کالیبراسیون صفر فراهم میکند.
برخی از سنسورهای سطح از نوع جابهجایی از قفس استفاده نمیکنند، بلکه عنصر جابهجایی را مستقیماً در مخزن فرآیند آویزان میکنند. به این سنسورها، سنسورهای «بدون قفس» میگویند. البته ابزارهای بدون قفس سادهتر از ابزارهای قفسی هستند، اما بدون کاهش فشار (و شاید حتی تخلیه) مخزن فرآیندی که در آن قرار دارند، نمیتوان آنها را سرویس کرد. همچنین اگر مایع داخل مخزن، چه با سرعت بالای جریان ورودی و خروجی مخزن، و چه با عملکرد پروانههای چرخان موتوری که در مخزن نصب شدهاند تا اختلاط کامل مایع(های) فرآیند را فراهم کنند، در معرض خطاهای اندازهگیری و «سر و صدا» قرار میگیرند.
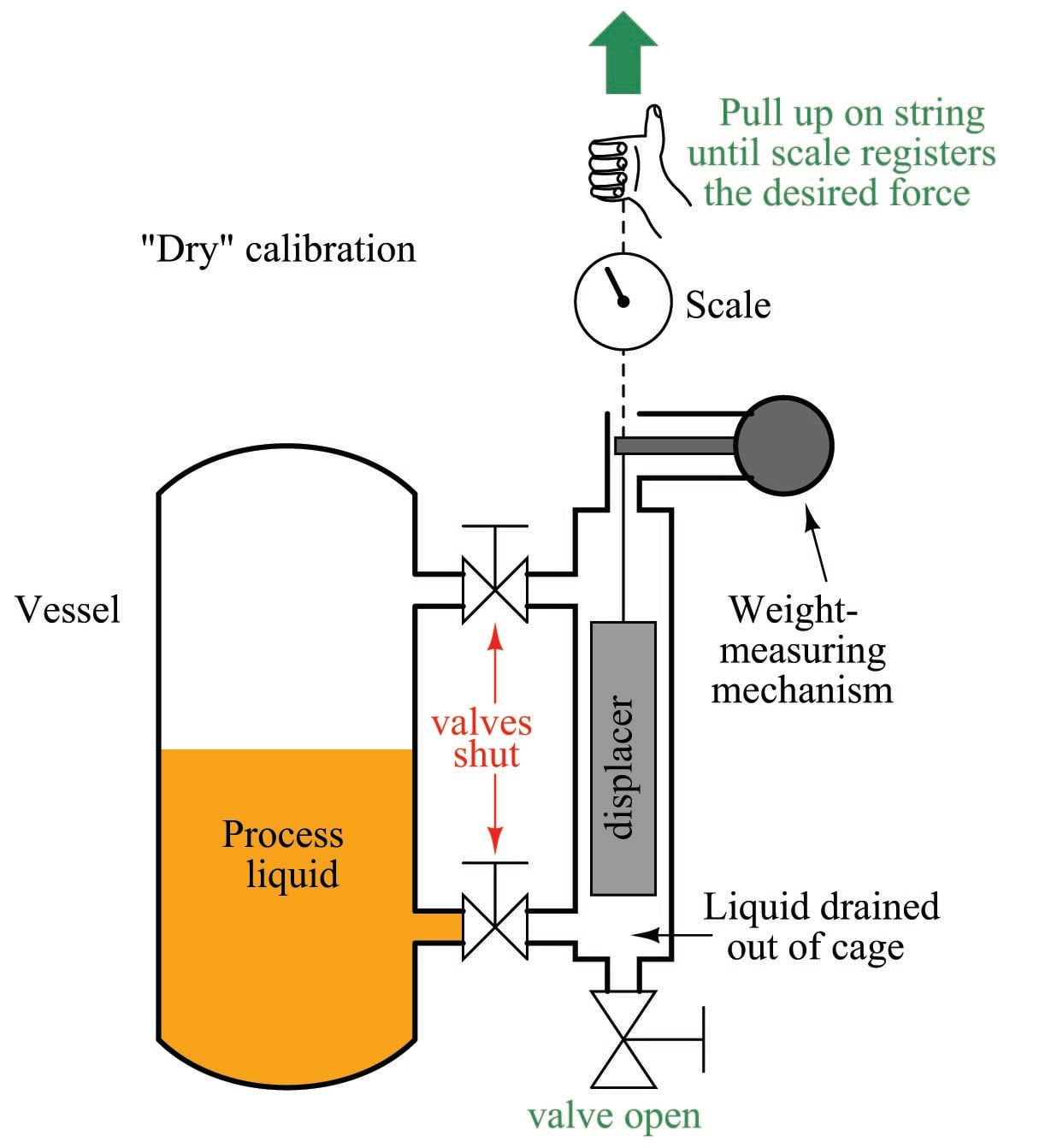
کالیبراسیون کامل را میتوان با پر کردن قفس با مایع فرآیند (a) انجام داد. مرطوب کالیبراسیون)، یا با آویزان کردن جابجاگر با یک نخ و مقیاس دقیق (a خشک کالیبراسیون)، کشیدن رو به بالای جابجاگر به مقدار مناسب برای شبیهسازی شناوری در سطح مایع ۱۰۰٪:
محاسبه این نیروی شناوری کار سادهای است. طبق اصل ارشمیدس، نیروی شناوری همیشه برابر با وزن حجم سیال جابجا شده است. در مورد یک ابزار سطحسنج مبتنی بر جابجایی در محدوده کامل، این معمولاً به این معنی است که کل حجم عنصر جابجایی در مایع غوطهور است. به سادگی حجم جابجایی را محاسبه کنید (اگر استوانهای باشد،
برای مثال، اگر چگالی وزنی سیال فرآیند ۵۷.۳ پوند بر فوت مکعب باشد و جابجاگر یک استوانه با قطر ۳ اینچ و طول ۲۴ اینچ باشد، نیروی لازم برای شبیهسازی شرایط شناوری در سطح کامل را میتوان به صورت زیر محاسبه کرد:
توجه داشته باشید که حفظ ثبات واحدها چقدر مهم است! چگالی مایع بر حسب واحد پوند بر مکعب داده شده است. پا و ابعاد جابجاگر در اینچکه بدون تبدیل بین فوت و اینچ مشکلات جدی ایجاد میکرد. در کار نمونهام، تصمیم گرفتم چگالی را به واحد پوند بر اینچ مکعب تبدیل کنم، اما میتوانستم به راحتی ابعاد جابجاگر را به فوت تبدیل کنم تا به حجم جابجاگر بر حسب فوت مکعب برسم.
در کالیبراسیون «مرطوب»، نیروی شناوری ۵.۶۳ پوندی توسط خود مایع ایجاد میشود و تکنسین اطمینان حاصل میکند که مایع کافی درون محفظه برای شبیهسازی شرایط سطح ۱۰۰٪ وجود دارد. در کالیبراسیون «خشک»، نیروی شناوری با اعمال کشش به سمت بالا روی جابجاکننده با استفاده از یک ترازوی دستی و نخ شبیهسازی میشود و تکنسین با نیروی ۵.۶۳ پوندی به سمت بالا میکشد تا دستگاه «فکر کند» سطح ۱۰۰٪ مایع را حس میکند، در حالی که در واقع جابجاکننده کاملاً خشک و در هوا معلق است.
لولههای گشتاور نارضایتی ابزارهای تراز
یک مشکل طراحی جالب برای ترانسمیترهای سطح از نوع جابجایی، نحوه انتقال وزن حس شده از جابجاگر به مکانیزم ترانسمیتر در عین آب بندی مثبت فشار بخار فرآیند از همان مکانیزم است. رایج ترین راه حل برای این مشکل، مکانیزم هوشمندانه ای به نام ... است. لوله گشتاورمتأسفانه، درک لولههای گشتاور میتواند نسبتاً دشوار باشد، مگر اینکه دسترسی عملی مستقیم به آنها داشته باشید، و بنابراین این بخش این مفهوم را با جزئیات بیشتری نسبت به آنچه معمولاً در کتابچههای مرجع موجود است، بررسی خواهد کرد.
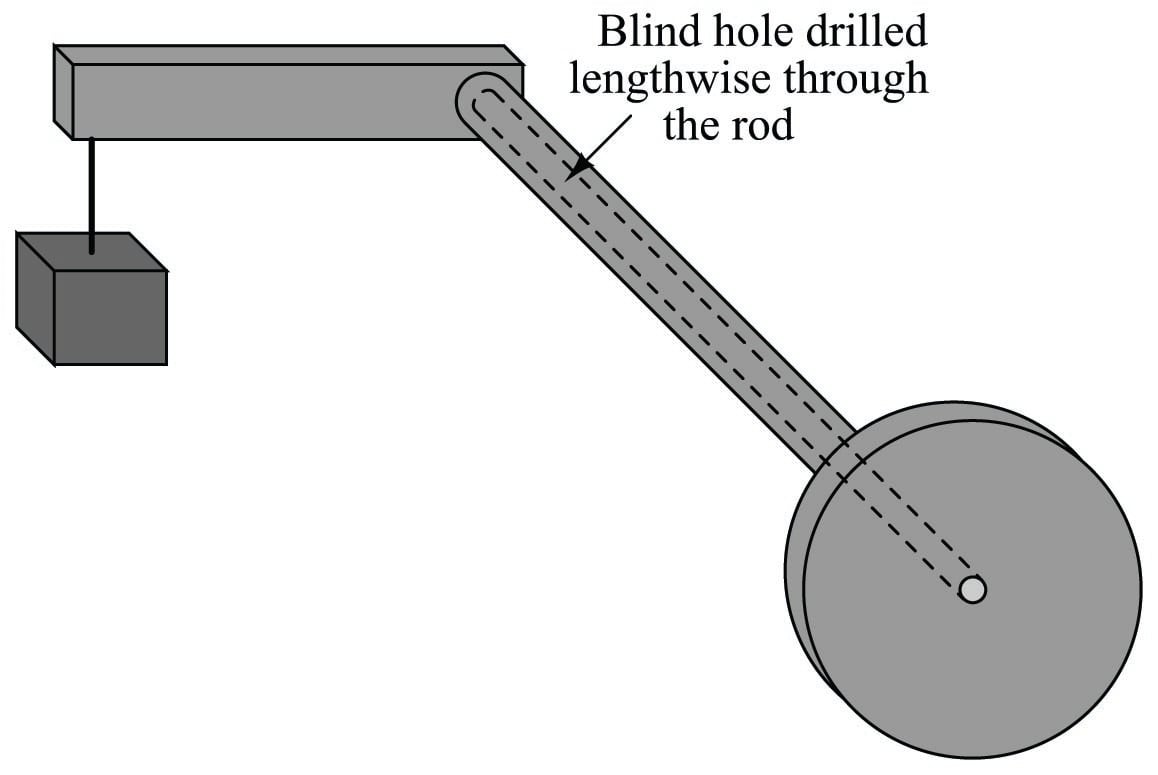
یک میله فلزی افقی و توپر را تصور کنید که در یک سر آن یک فلنج و در سر دیگر آن یک اهرم عمودی قرار دارد. فلنج به یک سطح ثابت نصب شده و یک وزنه از انتهای اهرم آویزان است. یک دایره خط چین نشان میدهد که میله به مرکز فلنج جوش داده شده است:
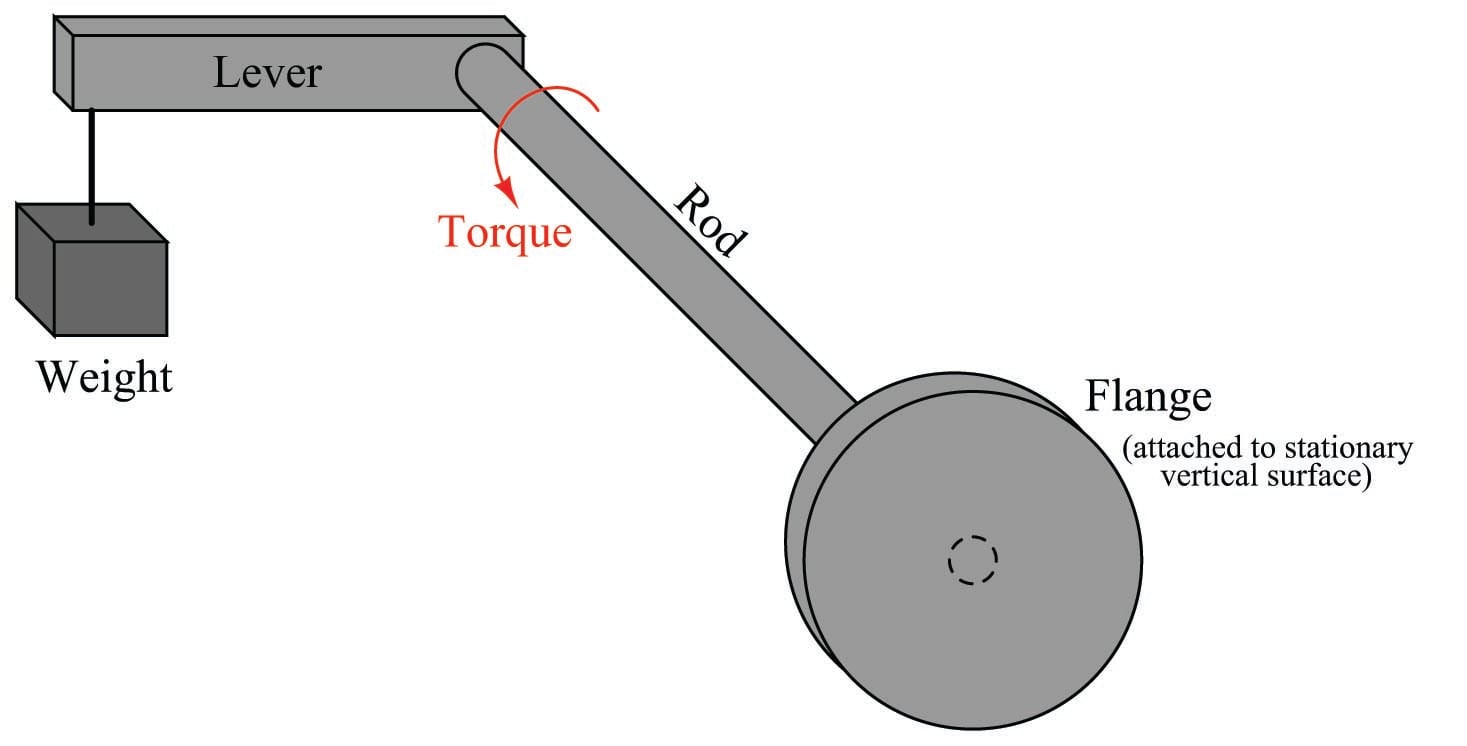
نیروی رو به پایین وزنه که بر اهرم وارد میشود، یک نیروی پیچشی (گشتاور) به میله وارد میکند و باعث میشود که میله در امتداد طول خود کمی بچرخد. هرچه وزن بیشتری در انتهای اهرم آویزان باشد، میله بیشتر میچرخد. تا زمانی که گشتاور اعمال شده توسط وزنه و اهرم هرگز از حد الاستیک میله تجاوز نکند، میله همچنان به عنوان فنر عمل خواهد کرد. اگر «ثابت فنر» میله را بدانیم و انحراف پیچشی آن را اندازهگیری کنیم، در واقع میتوانیم از این حرکت جزئی برای اندازهگیری بزرگی وزنه آویزان شده در انتهای اهرم استفاده کنیم.
در یک ابزار سطحسنج از نوع جابهجاکننده، یک جابهجاکننده جای وزنه را در انتهای اهرم میگیرد و انحراف پیچشی این میله، نیروی شناوری را نشان میدهد. با بالا آمدن مایع، نیروی شناوری روی جابهجاکننده افزایش مییابد و باعث میشود جابهجاکننده از دید میله سبکتر به نظر برسد. حرکت جزئی میله که ناشی از این تغییر وزن ظاهری است، سطح مایع را نشان میدهد.
حالا تصور کنید که یک سوراخ بلند را از طول میله ایجاد میکنید که تقریباً به انتهای جایی که اهرم متصل میشود میرسد. به عبارت دیگر، تصور کنید که سوراخ کور از مرکز میله، از لبهی میله شروع میشود و کمی جلوتر از اهرم تمام میشود:
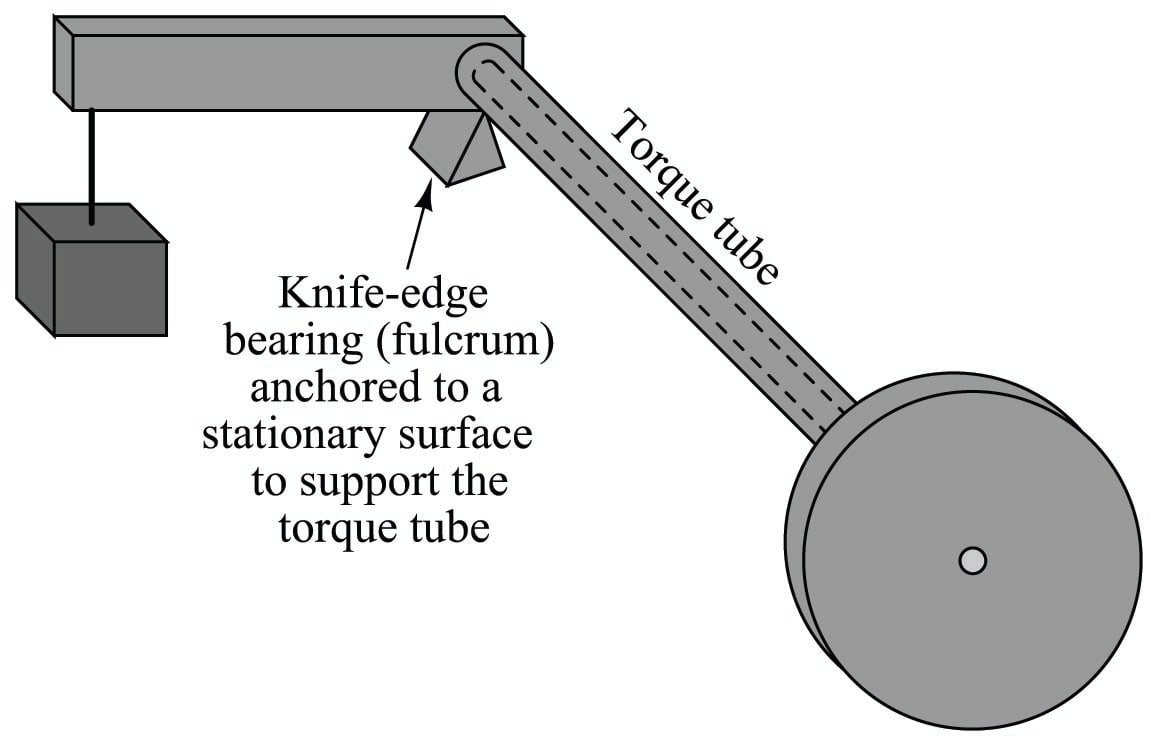
وجود این سوراخ بلند تغییر زیادی در رفتار مجموعه ایجاد نمیکند، مگر شاید تغییر در ثابت فنر میله. با فلز کمسختیتر، میله فنر ضعیفتری خواهد بود و با اعمال وزن در انتهای اهرم، بیشتر میپیچد. با این حال، برای هدف این بحث، مهمتر از آن، سوراخ بلند، میله را به یک ... تبدیل میکند. لوله با انتهای آببندی شده. به جای اینکه میله پیچشی باشد، اکنون به طور صحیحتر میله پیچشی نامیده میشود. لوله گشتاور، با اعمال وزن در انتهای اهرم، کمی میچرخد.
برای اینکه لوله گشتاور به صورت عمودی پشتیبانی شود تا در اثر وزن اعمال شده به سمت پایین خم نشود، یک تکیهگاه بلبرینگ لبه چاقویی اغلب در زیر انتهای اهرم، جایی که به لوله گشتاور متصل میشود، قرار میگیرد. هدف از این تکیهگاه، فراهم کردن تکیهگاه عمودی برای وزن و در عین حال تشکیل یک نقطه محوری تقریباً بدون اصطکاک است، که تضمین میکند تنها تنش اعمال شده به لوله گشتاور، ... گشتاور از اهرم:
در نهایت، یک میله فلزی محکم دیگر (با قطر کمی کوچکتر از سوراخ) را تصور کنید که به انتهای سوراخ کور جوش داده شده و تا انتهای فلنج امتداد یافته است:
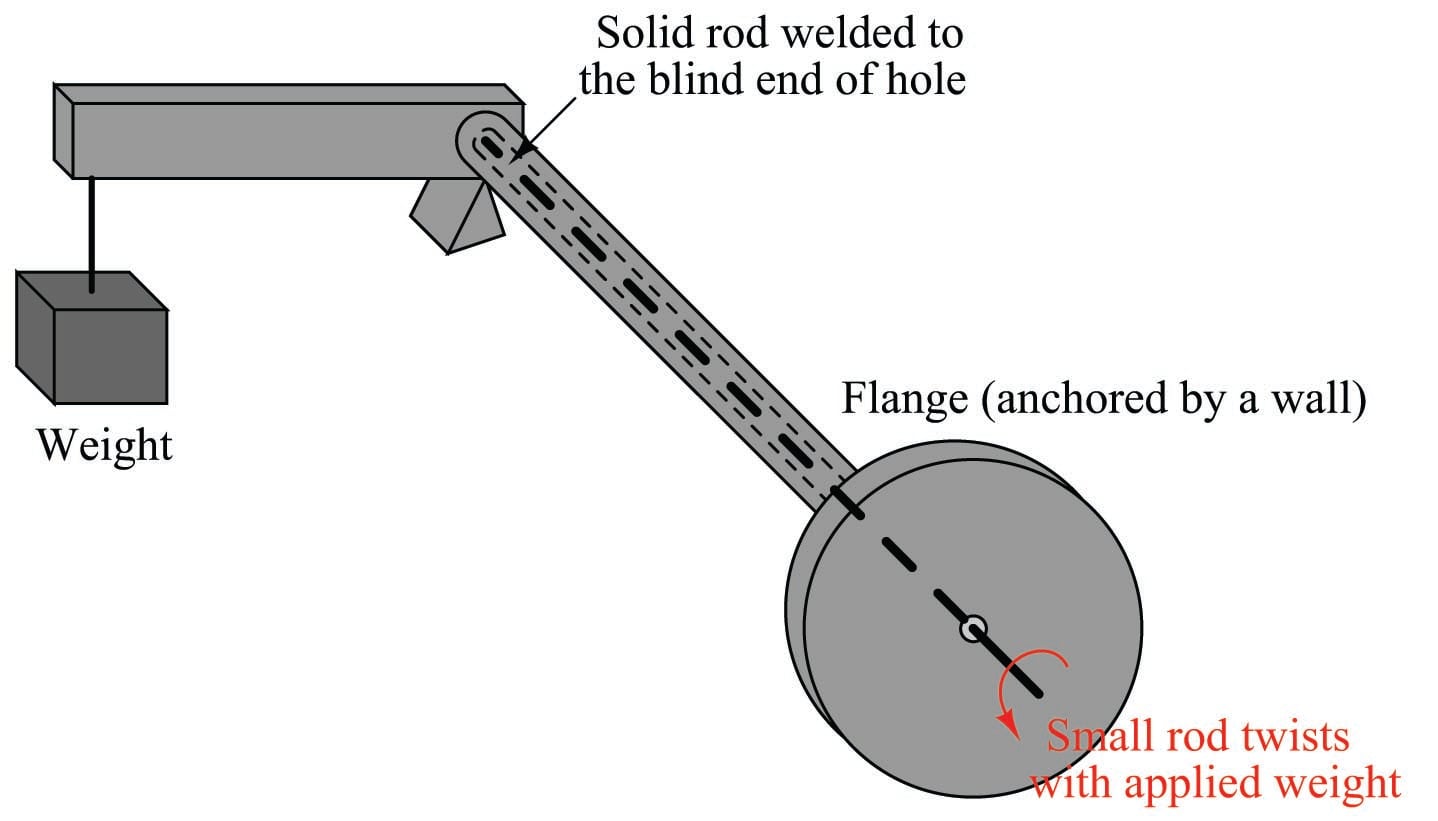
هدف از این میله با قطر کوچکتر، انتقال حرکت چرخشی انتهای دیگر لوله گشتاور به نقطهای فراتر از فلنج است که بتوان آن را حس کرد. فلنج را تصور کنید که به یک دیوار عمودی متصل است، در حالی که یک وزنه متغیر در انتهای اهرم به سمت پایین کشیده میشود. لوله گشتاور با نیروی متغیر در یک حرکت چرخشی خم میشود، اما اکنون میتوانیم با تماشای چرخش میله کوچکتر در سمت نزدیک دیوار، میزان چرخش آن را ببینیم. وزنه و اهرم ممکن است کاملاً توسط این دیوار از دید ما پنهان باشند، اما حرکت چرخشی میله کوچک با این وجود نشان میدهد که لوله گشتاور چقدر در برابر نیروی وزن تسلیم میشود.
میتوانیم این مکانیزم لوله گشتاور را برای اندازهگیری سطح مایع در یک مخزن تحت فشار به کار ببریم، به این صورت که وزنه را با یک جابجاگر جایگزین کنیم، فلنج را به نازلی که به مخزن جوش داده شده است وصل کنیم و یک دستگاه حسگر حرکت را با انتهای میله کوچک تراز کنیم تا چرخش آن را اندازهگیری کنیم. با بالا و پایین رفتن سطح مایع، وزن ظاهری جابجاگر تغییر میکند و باعث میشود لوله گشتاور کمی بچرخد. این حرکت چرخشی جزئی سپس در انتهای میله کوچک، در محیطی جدا از فشار سیال فرآیند، حس میشود.
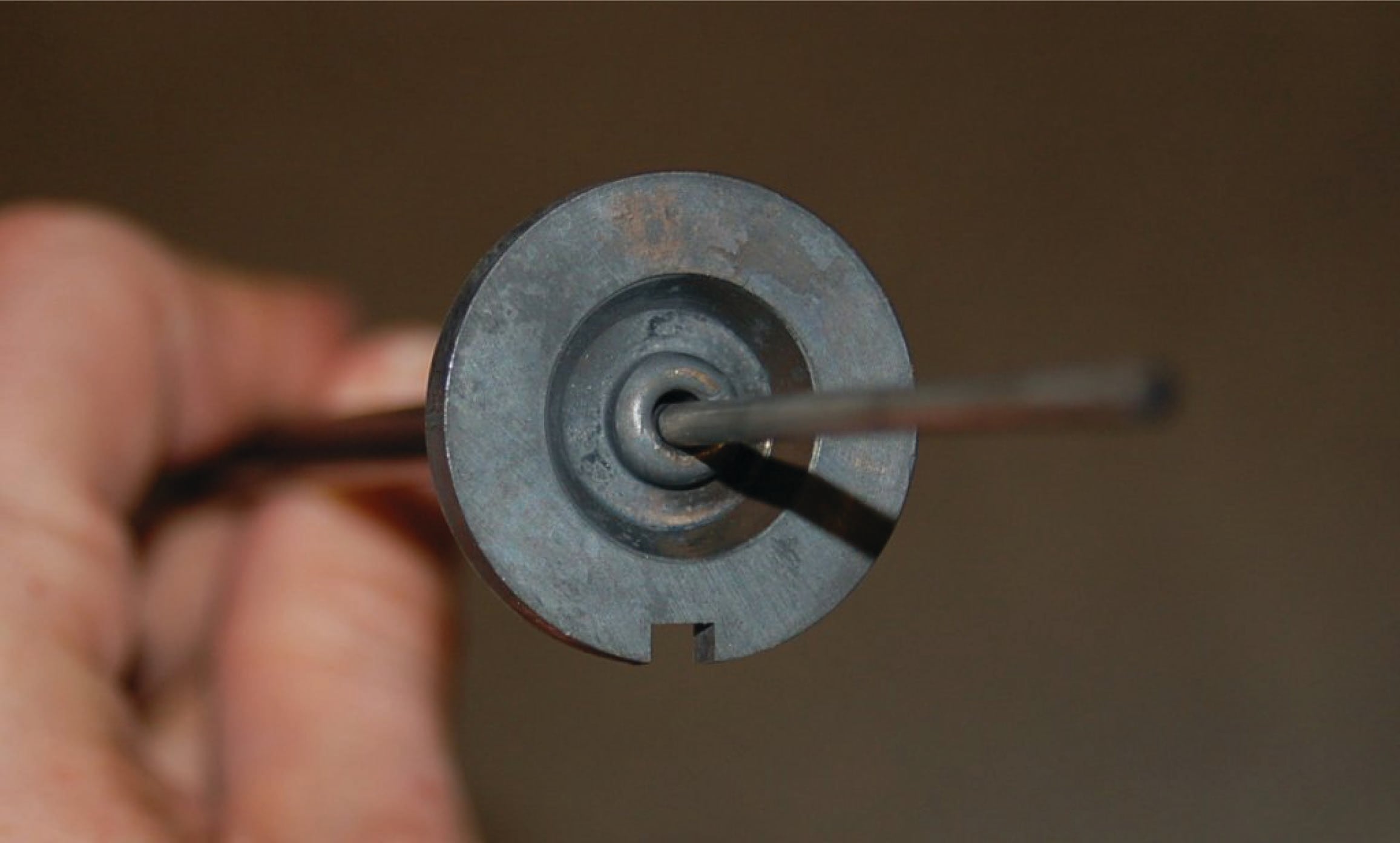
عکسی که از یک لوله گشتاور واقعی از یک فرستنده سطح فیشر "سطح-ترول" گرفته شده است، ظاهر خارجی آن را نشان میدهد:

فلز تیره رنگ، فولاد الاستیکی است که برای معلق نگه داشتن وزنه به عنوان فنر پیچشی استفاده میشود، در حالی که قسمت براق، میله داخلی است که برای انتقال حرکت استفاده میشود. همانطور که میبینید، خود لوله گشتاور قطر خیلی پهنی ندارد. اگر اینطور بود، فنر آن برای استفاده عملی در یک ابزار تراز از نوع جابجایی، بسیار سفت و سخت میشد، زیرا جابجایی معمولاً خیلی سنگین نیست و اهرم آن بلند نیست.
با نگاهی دقیقتر به هر دو انتهای لوله گشتاور، انتهای باز که میله با قطر کوچک از آن بیرون زده است (چپ) و انتهای «کور» لوله که به اهرم متصل میشود (راست) را مشاهده میکنید:

اگر مجموعه لوله گشتاور را از طول به دو نیم تقسیم کنیم، سطح مقطع آن چیزی شبیه به این خواهد بود:

تصویر بعدی، لوله گشتاور را به عنوان بخشی از یک ترانسمیتر سطح به سبک جابجایی کامل نشان میدهد:
همانطور که در این تصویر مشاهده میکنید، لوله گشتاور هنگام استفاده در یک کاربرد اندازهگیری سطح از نوع جابجایی، سه هدف متمایز را دنبال میکند: (1) به عنوان یک فنر پیچشی که وزن جابجایی را معلق نگه میدارد، (2) برای جلوگیری از فشار سیال فرآیند از مکانیسم حسگر موقعیت، و (3) برای انتقال حرکت از انتهای لوله گشتاور به مکانیسم حسگر.
در ترانسمیترهای سطح پنوماتیکی، مکانیزم حسگری که برای تبدیل حرکت پیچشی لوله گشتاور به سیگنال پنوماتیکی (فشار هوا) استفاده میشود، معمولاً از نوع ... است. تعادل حرکتی طراحی. به عنوان مثال، مکانیزم کنترل سطح فیشر، از یک لوله بوردون C شکل با یک نازل در انتها استفاده میکند تا از یک بافل متصل به میله کوچک پیروی کند. مرکز لوله بوردون با مرکز لوله گشتاور همسو است. با چرخش میله، بافل به سمت نازل در نوک لوله بوردون پیش میرود و باعث افزایش فشار برگشتی میشود که به نوبه خود باعث خم شدن لوله بوردون میشود. این خم شدن، نازل را از بافل پیشرونده دور میکند تا زمانی که یک وضعیت متعادل ایجاد شود. بنابراین حرکت میله با حرکت لوله بوردون متعادل میشود و این یک سیستم پنوماتیکی با تعادل حرکت است:

اندازهگیری سطح رابط جابجایی
ابزارهای اندازهگیری سطح جابهجاشونده میتوانند برای اندازهگیری سطوح تماس مایع-مایع، درست مانند ابزارهای اندازهگیری فشار هیدرواستاتیک، استفاده شوند. یکی از الزامات مهم این است که جابهجاشونده همیشه کاملاً غوطهور ("غرق") باشد. اگر این قانون نقض شود، ابزار قادر به تشخیص بین سطح پایین (کل) مایع و سطح پایین سطح تماس نخواهد بود. این معیار مشابه استفاده از ابزارهای اندازهگیری فشار تفاضلی با پایه جبرانی برای اندازهگیری سطوح تماس مایع-مایع است: برای اینکه ابزار صرفاً به تغییرات سطح تماس پاسخ دهد و با تغییرات سطح کل مایع "فریب" نخورد، هر دو نقطه اتصال فرآیند باید غوطهور باشند.
اگر ابزار جابجایی دارای "قفس" مخصوص به خود باشد، مهم است که هر دو لوله متصل کننده قفس به مخزن فرآیند (که گاهی اوقات "نازل" نامیده میشوند) در آب غوطهور باشند. این امر تضمین میکند که سطح مشترک مایع درون قفس با سطح مشترک داخل مخزن مطابقت داشته باشد. اگر نازل بالایی خشک شود، همان مشکلی که برای ابزار جابجایی دارای قفس مانند یک سطحسنج "شیشه دید" پیش میآید، میتواند برای یک ابزار جابجایی دارای قفس نیز رخ دهد (به بخش مربوطه مراجعه کنید). [مشکل_رابط] برای توضیح مفصل این مشکل، از صفحه شروع شروع کنید.)
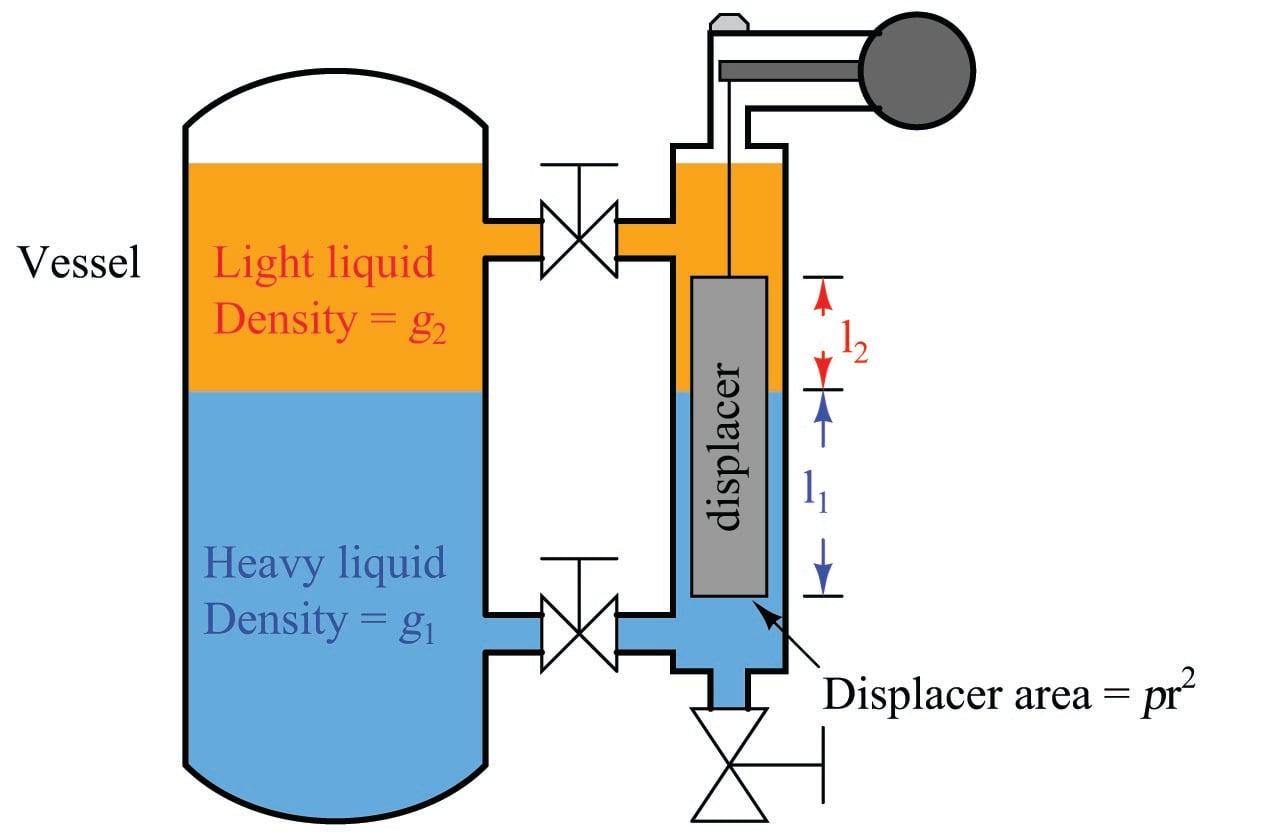
محاسبه نیروی شناوری وارد بر یک المان جابجاکننده ناشی از ترکیب دو مایع، آنقدرها هم که به نظر میرسد دشوار نیست. اصل ارشمیدس همچنان پابرجاست: نیروی شناوری برابر با وزن سیال (یا سیالات) جابجا شده است. تنها کاری که باید انجام دهیم محاسبه وزن و حجم ترکیبی مایعات جابجا شده برای محاسبه نیروی شناوری است. برای یک مایع واحد، نیروی شناوری برابر با چگالی وزنی آن مایع است (
برای یک سطح مشترک دو مایع، نیروی شناوری برابر با مجموع وزن دو مایع جابجا شده است، که هر عبارت وزن مایع برابر با چگالی وزنی آن مایع ضربدر حجم جابجا شده آن مایع است:
با فرض یک جابجاکننده با سطح مقطع ثابت در سراسر طول آن، حجم برای هر جابجایی مایع به سادگی برابر با همان مساحت است (
از آنجایی که منطقه (
تعیین نقاط کالیبراسیون یک ابزار اندازهگیری سطح از نوع جابهجایی برای کاربردهای رابط، در صورتی که شرایط ال آر وی و یو آر وی به عنوان یک جفت «آزمایش فکری» درست همانطور که با اندازهگیری سطح رابط هیدرواستاتیک انجام دادیم، بررسی شوند، نسبتاً آسان است. ابتدا تصور میکنیم که وضعیت جابهجایی با رابط در مقدار محدوده پایینتر چگونه خواهد بود، سپس سناریوی متفاوتی را با رابط در مقدار محدوده بالاتر تصور میکنیم. برای وضوح بیشتر، ترسیم تصاویر هر سناریو توصیه میشود.
فرض کنید یک ابزار اندازهگیری جابجایی داریم که سطح مشترک بین دو مایع با وزن مخصوص ۰.۸۵۰ و ۱.۱۰ را اندازهگیری میکند، با طول جابجایی ۳۰ اینچ و قطر جابجایی ۲.۷۵ اینچ (شعاع = ۱.۳۷۵ اینچ). بیایید فرض کنیم که در این مورد، ال آر وی جایی است که سطح مشترک در پایین جابجایی و یو آر وی جایی است که سطح مشترک در بالای جابجایی قرار دارد. قرار دادن سطوح مشترک ال آر وی و یو آر وی در انتهای طول جابجایی، محاسبات ال آر وی و یو آر وی ما را ساده میکند، زیرا «آزمایش فرضی» ال آر وی به سادگی جابجایی کاملاً غوطهور در مایع سبک و «آزمایش فرضی» یو آر وی به سادگی جابجایی کاملاً غوطهور در مایع سنگین خواهد بود.
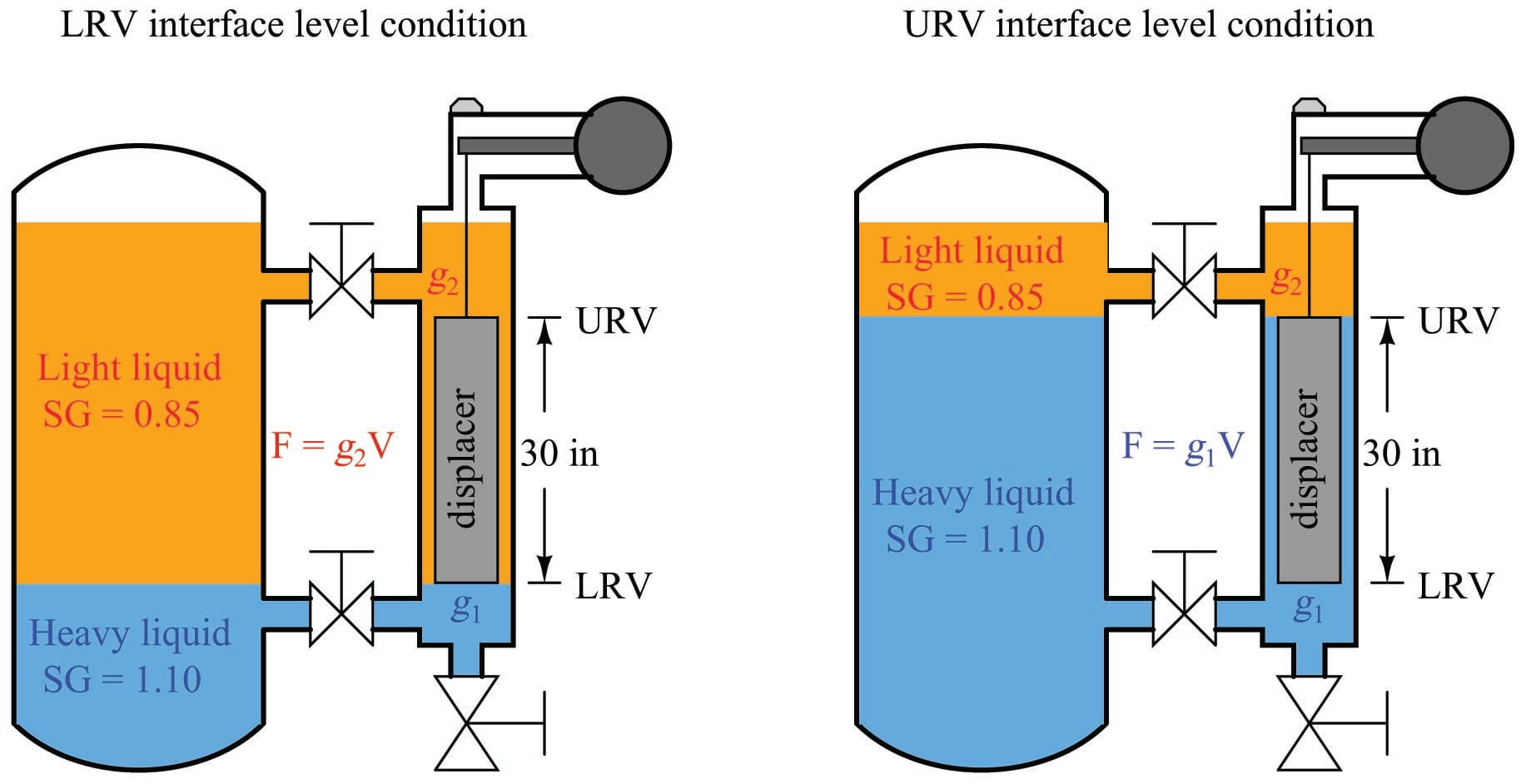
محاسبه نیروی شناوری ال آر وی:
محاسبه نیروی شناوری یو آر وی:
نمایش محاسبات واقعی برای این مثال فرضی:
شناوری برای هر درصد اندازهگیری بین ال آر وی (0%) و یو آر وی (100%) را میتوان با درونیابی محاسبه کرد:
| سطح رابط (اینچ) | نیروی شناوری (پوند) |
|---|---|
| 0 | ۵.۴۷ |
| ۷.۵ | ۵.۸۷ |
| 15 | ۶.۲۷ |
| ۲۲.۵ | ۶.۶۸ |
| 30 | ۷.۰۸ |